# Exakte Ausrichtung
## Vorbereitungen für die Ausrichtung
* Verschrauben sie die Main Achse Y1 auf Ihrer Maschine an der gewünschten Position, die Auflagefläche muss eben sein.
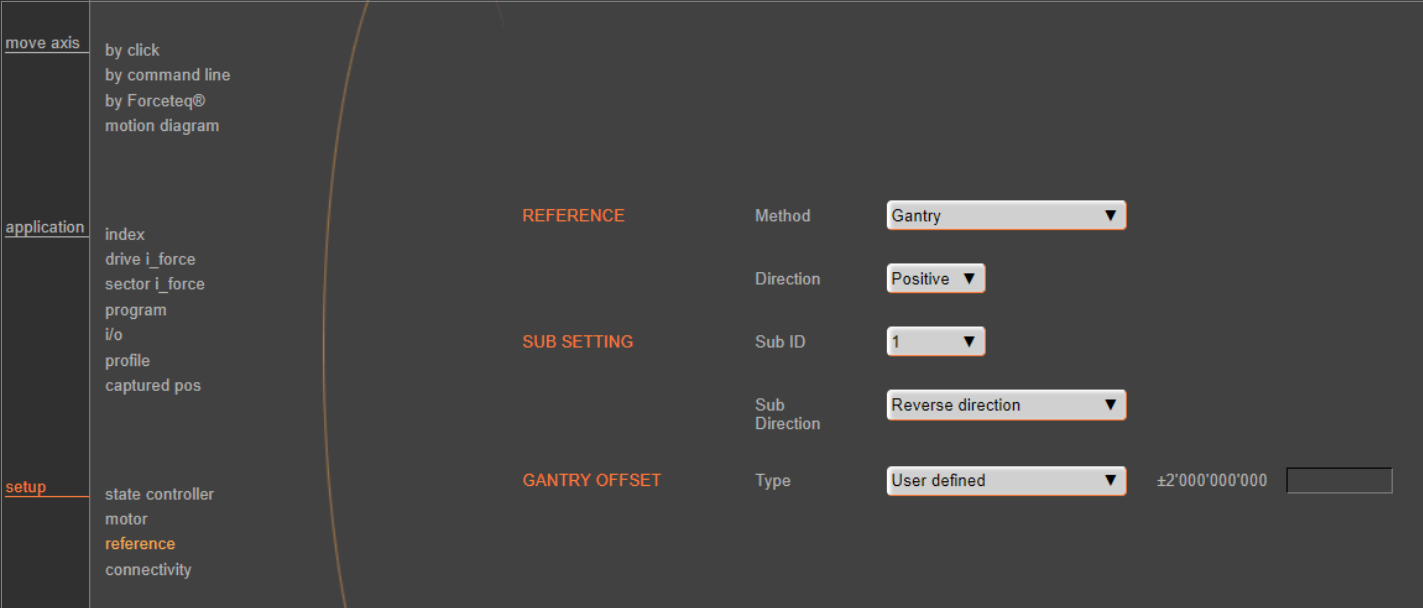
* Wechseln Sie die REFERENCE Methode zu “Gantry”
* Normalerweise entspricht die “Sub Direction” der “Reverse direction”, wenn sich die Steckergehäuse auf der Aussenseite der beiden Y-Achsen befinden.
* GANTR OFFSET auf “User defined” Wenn die beiden Y-Achsen in der Länge ausgerichtet sind, dann setzen Sie den Anfangswert des Gantry Offsets auf 0. Falls die Y-Achsen versetzt montiert wurden, muss der entsprechende Versatz initial eingetragen werden.
***
{% stepper %}
{% step %}
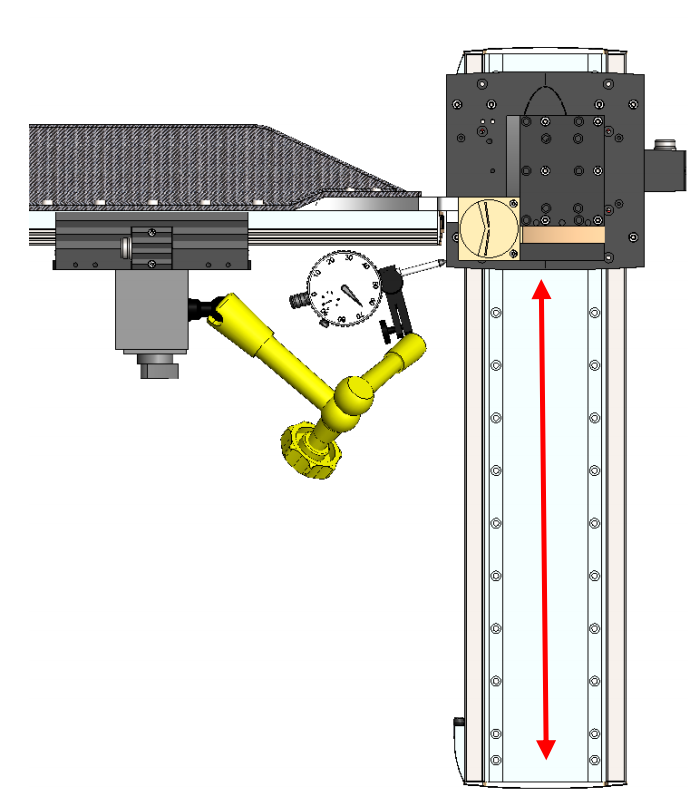
### Parallelität der beiden Y-Achsen
Die Main Achse Y1 ist in der richtigen Position fixiert.
Mit der Messuhr kann nun der Abstand zwischen dem Schlitten\
der X-Achse und der Sub Achse Y2 gemessen werden.
Durch Hin- und Herbewegen der beiden referenzierten Y-Achsen, kann die Parallelität der beiden Y-Achsen zueinander gemessen werden.
Fehlerabschätzung:
$$
𝐹𝑒ℎ𝑙𝑒r =√(𝐻𝑢𝑏^2 + ∆𝑀𝑒𝑠𝑠𝑎𝑏𝑤𝑒𝑖𝑐ℎ𝑢𝑛𝑔^2) -𝐻𝑢b
$$
Eine Abweichung von 0.2mm über 500mm resultieren dabei in einen Fehler von unter 40nm.
Falls erforderlich, kann diese durch das Verstellen der Sub Achse Y2 korrigiert werden.
Zum fixieren der Sub Achse Y2 Beginnen Sie in der Achsmitte und arbeiten sich abwechselnd von Schraubposition zu Schraubposition auf beiden Seiten vor. Dabei sollte die Gegenkraft durch das Lineargelenk auf die Sub Achse Y2 minimal bleiben.
{% endstep %}
{% step %}
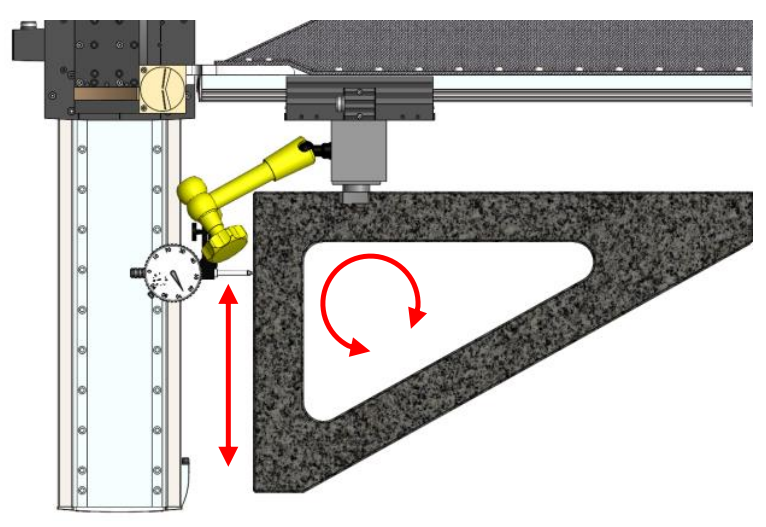
### Messwinkel zur Main Achse Y1 ausrichten
Zur Ausrichtung der Rechtwinkligkeit benötigen wir den Granitwinkel. Stellen Sie diesen dabei in den Arbeitsbereich Ihres Gantry Systems.
Im ersten Schritt wird nun der Messwinkel parallel zur Main Achse Y1 ausgerichtet.
Die X-Achse wird durch bestromen Arretiert und die beiden Y-Achsen mit der Messuhr entlang des Messwinkels hin und her bewegt.
Richten sie nun den Messwinkel so aus, dass die Parallelität innerhalb weniger Mikrometer gewährleistet ist.
{% endstep %}
{% step %}
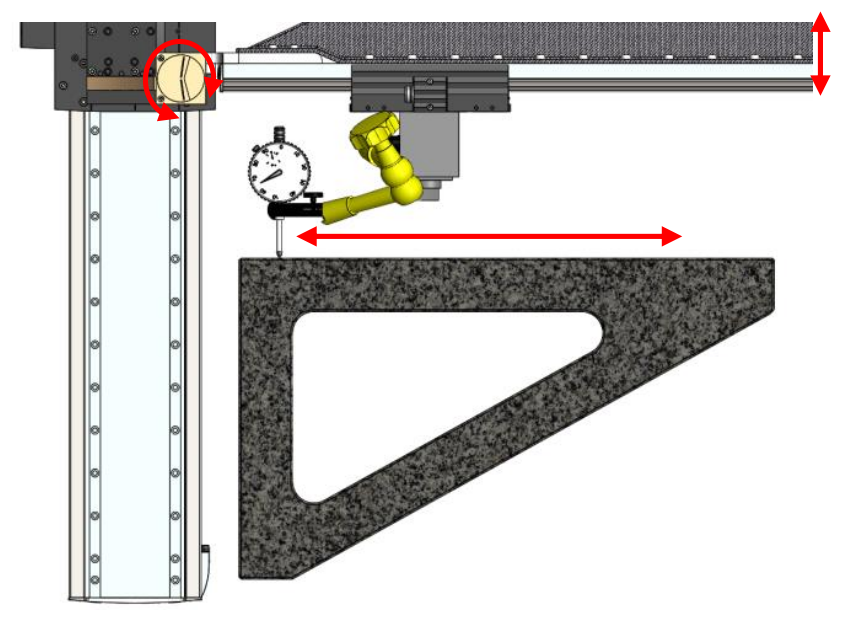
### Rechtwinkligkeit der Main Achse Y1 zur X-Achse
Nun setzen Sie die Messuhr auf die andere Seite des Messwinkels. Achten Sie darauf den Messwinkel dabei nicht zu verschieben.
Fahren Sie nun mit der X-Achse, gesteuert über das WebMotion® vor- und zurück. Stellen Sie den Parameter “GANTRY OFFSET” im WebMotion® dabei so ein das sich über den Verfahrweg nur wenige Mikrometer Abweichung ergeben.
Je nach Auflösung des Messsystems kann die Einstellung dabei mit einer\
Auflösung von +/- 1µm oder +/-100nm erfolgen.
$$
heoretische Offsetkorrektur = 𝑋 −𝐴𝑐ℎ𝑠𝑒𝑛𝑙ä𝑛𝑔𝑒⁄𝑀𝑒𝑠𝑠𝑑𝑖𝑠𝑡𝑎𝑛𝑧 ∗ ∆𝑀𝑒𝑠𝑠𝑎𝑏𝑤𝑒𝑖𝑐ℎ𝑢𝑛𝑔
$$
{% endstep %}
{% endstepper %}
---
# Agent Instructions
This documentation is published with GitBook. GitBook is the documentation platform designed so that both humans and AI agents can read, navigate, and reason over technical content effectively. Learn more at gitbook.com.
## Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter:
```
GET https://tech.jennyscience.com/motion_systems/motion-systems-de/linax/lxs-gantry/exakte-ausrichtung.md?ask=
```
The question should be specific, self-contained, and written in natural language.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.