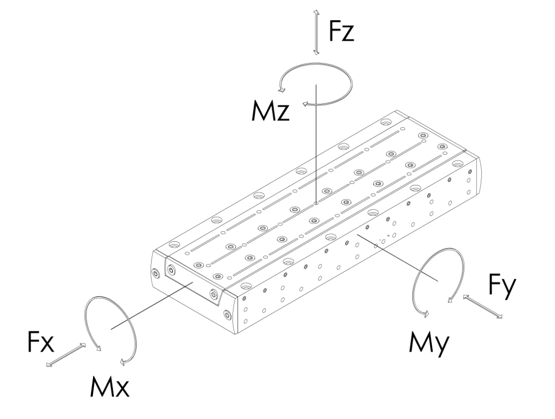
Wirken gleichzeitig mehrere Kräfte und Momente auf den Antrieb, muss nebst Einhaltung der einzelnen Maximalbelastungen die nachstehende Gleichung erfüllt sein:
$$
\frac{|Fy|}{Fy\_{\text{max}}} + \frac{|Fz|}{Fz\_{\text{max}}} + \frac{|Mx|}{Mx\_{\text{max}}} + \frac{|My|}{My\_{\text{max}}} + \frac{|Mz|}{Mz\_{\text{max}}} \leq 1
$$
{% endcolumn %}
{% endcolumns %}
***
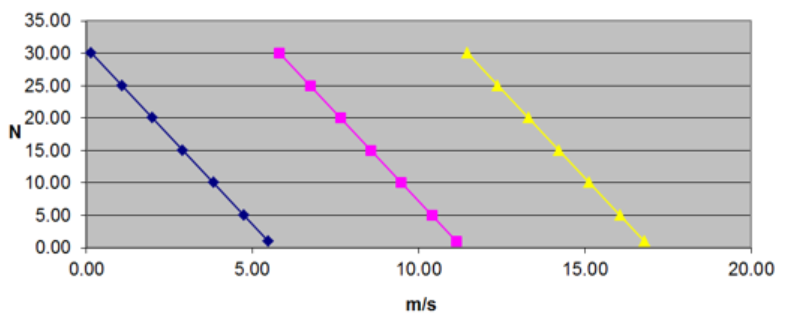
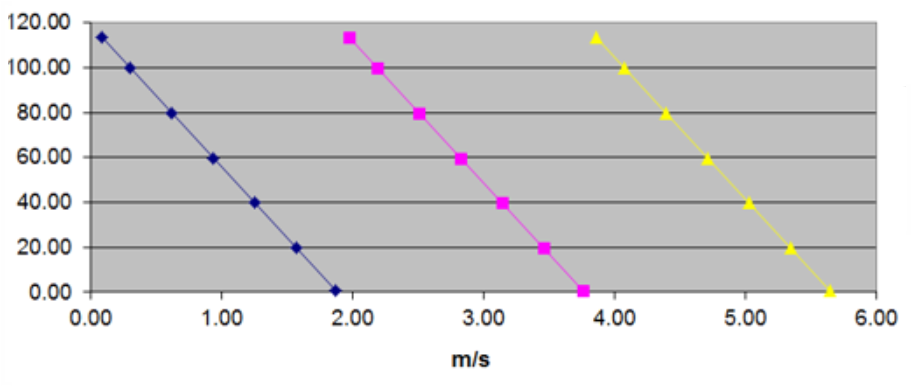
## Lebensdauer
{% columns %}
{% column width="50%" %}
{% endcolumn %}
{% column width="50%" %}
#### Empfehlungen
Massnahmen welche die Lebensdauer verlängern:
* Trajektorien mit Kurvenprofil, anstelle Trapezprofil vorgeben (XENAX® Servocontroller, Defaultwert S-Kurven Profil = 20%)
* Dynamik immer nur so hoch wie notwendig
* Nicht Taktzeitrelevante Bewegungen langsamer ausführen.
* Verhindern dass Schmutzpartikel in die Führung gelangen.
{% endcolumn %}
{% endcolumns %}
{% columns %}
{% column %}
{% endcolumn %}
{% column %}
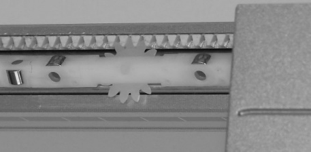
#### Kreuzrollenlagerung
Die LINAX® Lxc und ELAX® arbeiten nahezu verschleißfrei und gewährleisten dadurch eine hohe Genauigkeit über die gesamte Lebensdauer.
Die mechanische Führung ist dabei das lebensdauerbestimmende Element. Die eingesetzten Präzisionsführungen zeichnen sich durch eine hohe Tragfähigkeit, Steifigkeit und Langzeitstabilität aus. Hochwertige Werkstoffe sowie eine optimierte Auslegung der Führungskomponenten sorgen für eine hohe Robustheit und dauerhaft präzise Bewegungen.
Die Kreuzrollenführungen zeichnen sich durch folgende Eigenschaften aus:
* Hohe Präzision und Stabilität
* Geringer Wartungsaufwand
* Weniger schmutzempfindlich als geschlossene Kugelumlaufsysteme
Unsere langjährige Erfahrung zeigt: Bei mittlerer Belastung, regelmäßiger Wartung und sauberer Umgebung sind Lebensdauern von über 350 Millionen Zyklen erreichbar.
{% endcolumn %}
{% endcolumns %}
{% columns %}
{% column %}
{% endcolumn %}
{% column %}
* Wartungsempfehlungen im [Wartungskapitel ](/motion_systems/motion-systems-de/linax/lxc/installation-und-wartung.md)beachten
{% endcolumn %}
{% endcolumns %}
---
# Agent Instructions
This documentation is published with GitBook. GitBook is the documentation platform designed so that both humans and AI agents can read, navigate, and reason over technical content effectively. Learn more at gitbook.com.
## Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter:
```
GET https://tech.jennyscience.com/motion_systems/motion-systems-de/linax/lxc/leistungsdaten.md?ask=
```
The question should be specific, self-contained, and written in natural language.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.